微小物体力学に基づくマニピュレーション技術
微細毛構造による表面柔軟性を持つ静電チャック
近年、平滑面を持つシリコンウエハの搬送用途以外に、グリッパなどの器具を用いた「つまむ」あるいは「つかむ」という動作を必要とせず、金属薄膜、誘電体膜(プラスチック、紙、布など)を表面にて確実に把持・離脱する需要が高まっています。従来型の静電チャック(注)は電極を配置した把持表面を平坦で硬く仕上げています。これは、効率的に静電力を発生し、半導体ウエハなどの把持対象物の安定したハンドリングを実現するためですが、一方で、凹凸を有する面を持つ物体や膜状の物体を自由自在にハンドリングすることを不得手としています。当研究グループでは、自然界において、壁や天井に貼り付くことができ、かつ自由に動き回ることができるヤモリからヒントを得て、「微細毛構造による表面柔軟性を持つ静電チャック」(以下、「微細毛柔軟静電チャック」と呼称)を開発しています。
(注)静電チャック:電圧印加によって発生する電界に起因する静電力によって、物体を吸着する機構。現在は主に、半導体ウエハやガラスのフラットパネルの搬送に用いられている。
フィルムハンドリングのデモ
3Dプリントで積層したデバイスを用いて、薄いフィルムのハンドリングが可能になりました。動画では、平面への貼付けを行っています。
様々な製作方法と性能評価
様々な手法を利用して、微細毛を持つ静電チャックの試作・検証を行っています。一部の例は以下のようになります。研究を進める上では、学内の共同研究者との議論、学内共通設備や学外設備、研究室内の設備を利用した試作、有限要素法を用いた解析等を活用します。
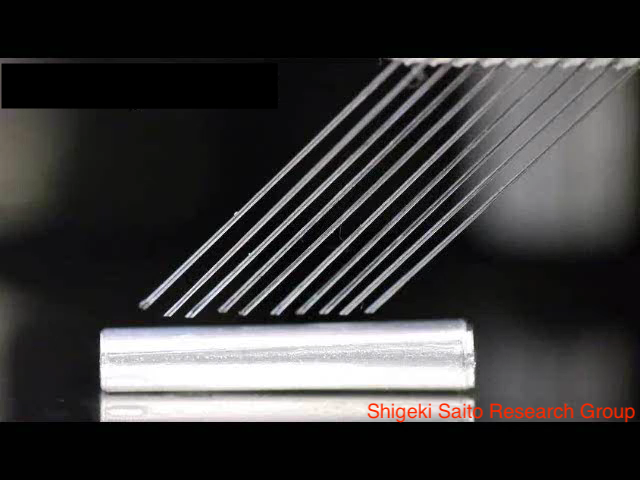
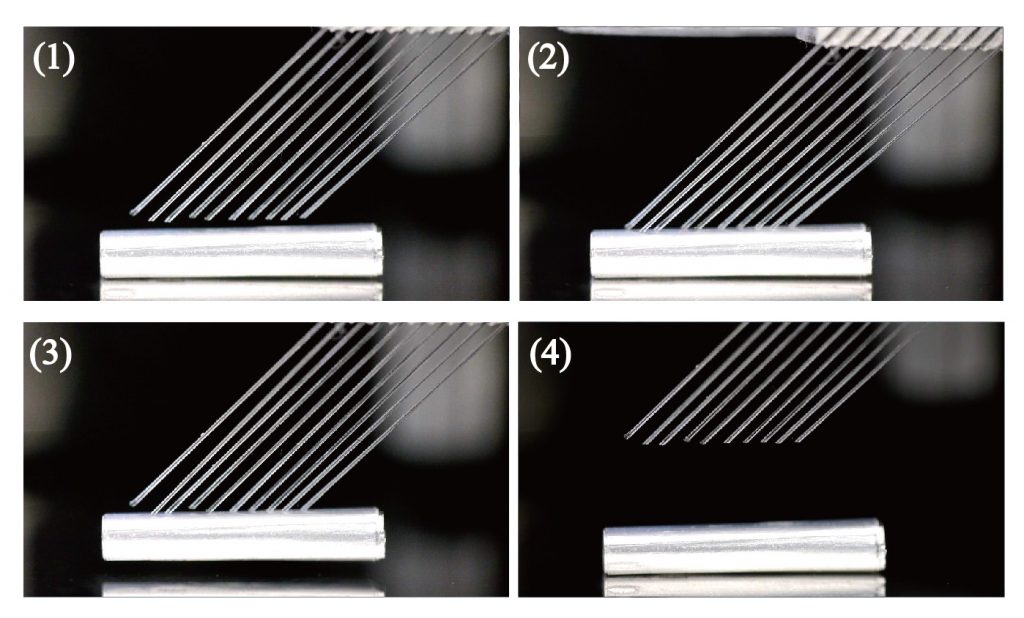
単極型(静電誘導ファイバー方式、配列型)
- 静電誘導ファイバー(直径250μm)10本を配列
- 把持対象物:アルミ箔製パイプ(重量: 18.8mgf , PSフィルムコーティング)
- 発生力=0.18mN(600V印加時)単位面積辺り発生力=0.07kPa
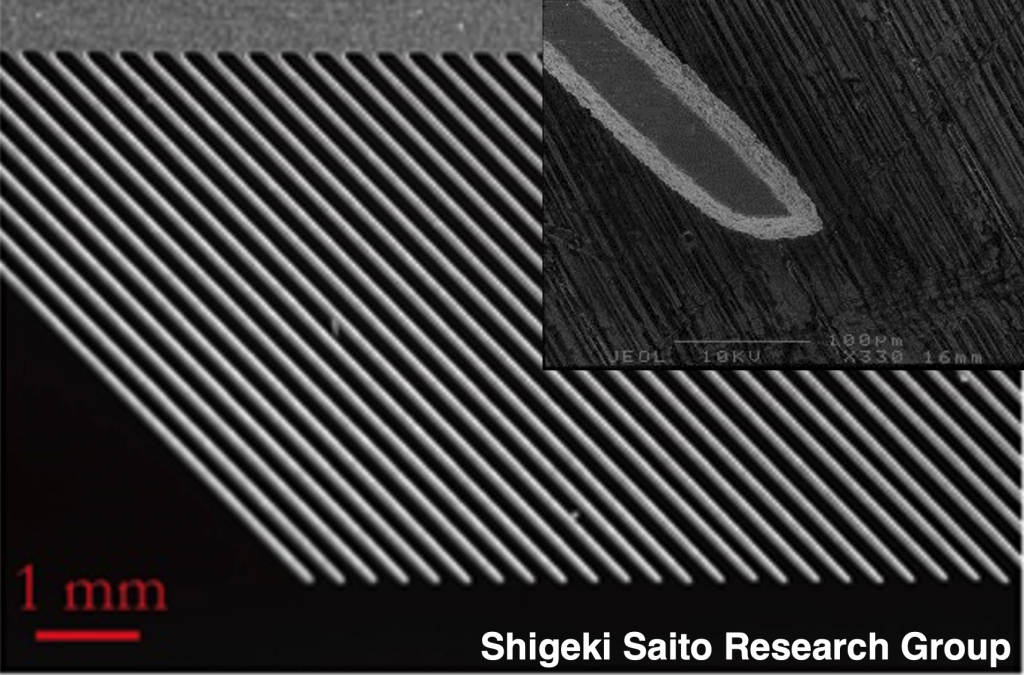
単極ファイバー型(エッチング方式)
- 厚さ50mmステンレス鋼(SUS304)
- 微細毛幅100μm、間隔250μm
- 発生力=0.34mN(600V印加時)
- 単位面積辺り発生力=0.4kPa
双極ファイバー型(リソグラフィー方式)
- 母材:SOI(Silicon on insulator)
- 微細毛幅200mm、間隔300mm
- モジュール厚さ498mm
- 発生力=0.21mN(±150V印加時)
- 単位面積辺り発生力=0.07kPa
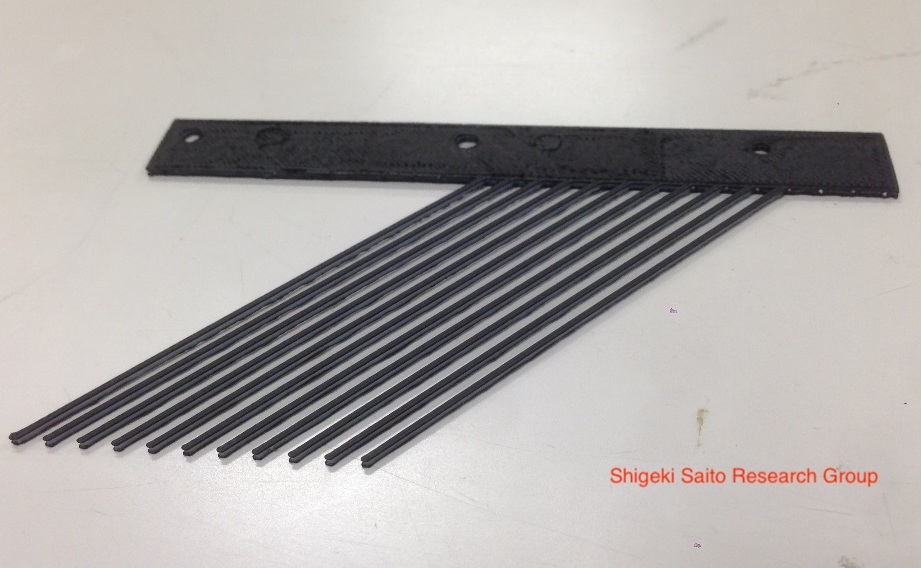
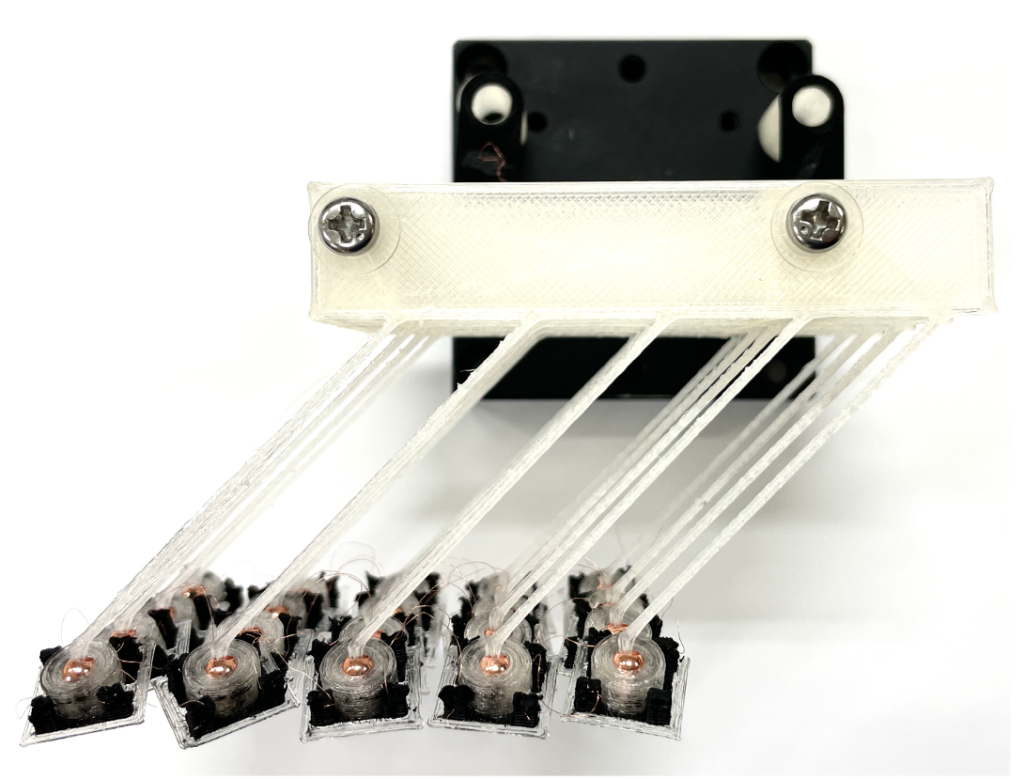
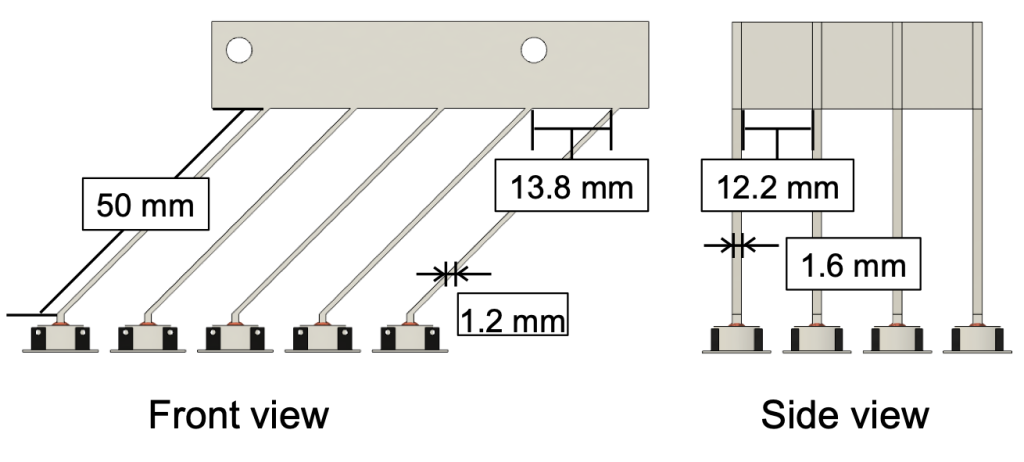
双極型(3Dプリンティング方式)
- 厚さ 1.6 mm カーボンとPLA
- 微細毛幅1.2mm
- 発生力=24.5mN(±600V印加時)
- 単位面積辺り発生力=0.3kPa
ボールジョイント型(3-RDOF型)
- 先端に回転自由度を持つ静電チャック
- 微細毛幅=1.2mm
- 1モジュール電極面積=88㎟
- 1モジュール単位面積当たり発生力=0.45kPa
Tomohiro Ryo, Yuki Taoka, Shigeki SAITO. 梁先端に回転自由度 を有する微細毛双極 型静電チャックの開 発, 2022年度精密工学会春季大会学術講演会, 2022年度精密工学会春季大会学術講演会論文集, Mar. 2022.
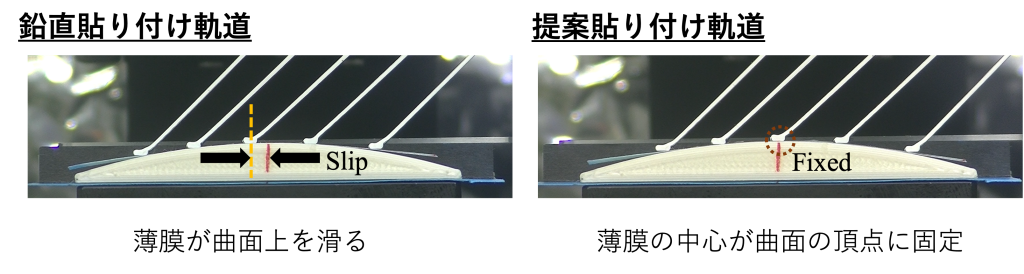
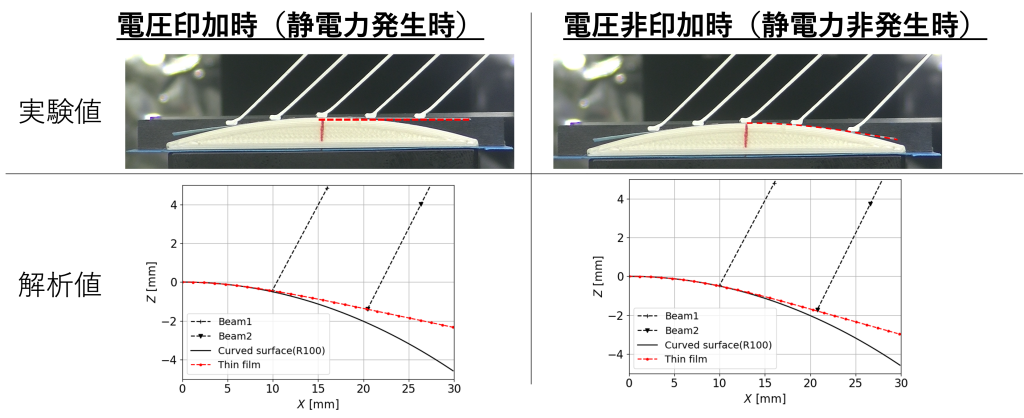
貼り付け・離脱軌道の提案
- R100曲面への薄膜貼付に成功
- 薄膜-対象物間の滑りがない状態
- バネ・質量モデルに基づく計算により貼り付け軌道を計算
Yuki Taoka, Terumichi Hayashi, Pasomphone Hemthavy, Kunio Takahashi, Shigeki Saito. Development of a bipolar electrostatic chuck with a compliant beam-array assembly having four 3D-printed layers for large film handling, Engineering Research Express, IOP Publishing, Volume 4, Number 1, Jan. 2022.